


















Żuraw jednobelkowy Eot
Opis produktów
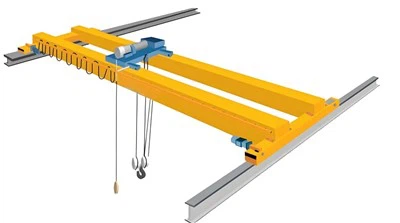
Żuraw jednobelkowy EOT (elektryczny pomostowy) to wszechstronne rozwiązanie podnoszące, szeroko stosowane w różnych gałęziach przemysłu do zadań związanych z transportem materiałów. Zaprojektowany z wykorzystaniem pojedynczego dźwigara (belki) i wsparty na wciągniku elektrycznym, oferuje wydajny i opłacalny sposób podnoszenia i transportu ładunków na określonym obszarze.
Żuraw jednobelkowy EOT składa się z poziomej belki wspartej na ramach końcowych. Wciągnik elektryczny porusza się wzdłuż belki w celu podnoszenia i przenoszenia. Można je dostosować do różnych rozpiętości i wysokości podnoszenia, aby spełnić potrzeby operacyjne. Sterowany za pomocą pilota, pilota lub kabiny operatora dla wygody i bezpieczeństwa. Wykonane z materiałów o wysokiej wytrzymałości, aby zapewnić długotrwałe działanie. Minimalne wymagania konserwacyjne skracają przestoje.
Żuraw jednobelkowy EOT jest niezbędnym narzędziem do wydajnego i bezpiecznego transportu materiałów w nowoczesnych gałęziach przemysłu. Jego przystępna cena, elastyczność i niezawodność sprawiają, że jest to popularny wybór dla firm chcących zoptymalizować swoje działania.
Suwnice jednodźwigarowe EOT nadają się do lżejszych ładunków, redukując początkowe koszty inwestycji i konserwacji. Zajmuje minimalną przestrzeń, maksymalizując jednocześnie wydajność operacyjną. Ma prostszą konfigurację niż alternatywne rozwiązania z podwójnym dźwigarem. Nadaje się do różnych gałęzi przemysłu, w tym produkcji, magazynów i linii montażowych.
Podstawowe komponenty: silnik, silnik, przekładnia
Miejsce pochodzenia: Chiny
Gwarancja 1 rok
Kontrola wychodząca wideo:Dostarczona
Raport z testów maszyn: Dostarczony
Zastosowanie: dźwig
Wysokość podnoszenia: 3 metry w standardzie
Pojemność: 10
Napięcie:220 V-690V/50 Hz
Kolor: żółty
Napięcie sterujące: 24 V
Słowa kluczowe: dźwig
Rodzaj zasilania: chodzenie ręczne
Model:LD
Rodzaj produktu: Suwnica
Serwis pogwarancyjny: pomoc techniczna wideo, pomoc online
Lokalna lokalizacja serwisu: Brak
Obsługa posprzedażna: zapewnione wsparcie techniczne wideo, wsparcie online

Zdjęcia i komponenty
1. Belka główna
1) Belka główna jednobelkowej suwnicy EOT (elektrycznej pomostowej) jest krytycznym elementem konstrukcyjnym zaprojektowanym do przenoszenia i rozkładania ładunku na całej rozpiętości żurawia. Współpracuje z wózkami końcowymi, mechanizmem podnoszącym i elementami jezdnymi.
Główną belką jednobelkowego żurawia EOT (Electric Overhead Travel) jest zwykle belka dwuteowa lub belka skrzynkowa. Wykonany ze stali konstrukcyjnej, zapewnia dużą wytrzymałość i trwałość. Zaprojektowane tak, aby były odporne na zginanie i uginanie pod obciążeniem.
3) Dźwig główny jednodźwigarowej suwnicy EOT (Electric Overhead Travel) zwykle utrzymuje ciężar dźwigu i podnoszonego ładunku. Ładunek jest równomiernie przenoszony na wózek końcowy i pas startowy podtrzymujący. Długość i przekrój dźwigara głównego projektuje się w zależności od rozpiętości i udźwigu suwnicy. Został zaprojektowany tak, aby minimalizować ugięcia w dopuszczalnym zakresie zgodnie z normami takimi jak FEM, ISO czy CMAA.
2. System podnoszenia
Silnik: Silnik układu podnoszenia w żurawiu jednobelkowym EOT (elektrycznym podwieszanym) odgrywa kluczową rolę w działaniu żurawia. Silnik ten jest zazwyczaj częścią mechanizmu podnoszącego, który podnosi i opuszcza ładunek.
Reduktor: Reduktor w układzie podnoszenia elektrycznej suwnicy pomostowej z pojedynczą belką (EOT) jest kluczowym elementem zaprojektowanym w celu zarządzania przenoszeniem prędkości i momentu obrotowego z silnika na mechanizm wciągnika. Odgrywa kluczową rolę w zapewnieniu płynnej, wydajnej i niezawodnej pracy podczas procesu podnoszenia. Reduktor montowany jest pomiędzy silnikiem a bębnem wciągnika.
Bęben: System podnoszenia bębna w suwnicy jednobelkowej EOT (elektrycznej pomostowej) to kluczowy element zaprojektowany w celu zapewnienia wydajnych i bezpiecznych operacji podnoszenia. Bęben odpowiada za zwijanie i rozwijanie liny stalowej, która podnosi lub opuszcza ładunek. Zapewnia płynną pracę poprzez przeniesienie energii mechanicznej wciągnika na ruch ładunku.
Lina stalowa: Lina stalowa w systemie podnoszenia suwnicy jednobelkowej EOT (elektrycznej suwnicy pomostowej) jest kluczowym elementem obsługującym proces podnoszenia ładunku. Jej konstrukcja i dobór mają kluczowe znaczenie dla zapewnienia bezpiecznej i wydajnej pracy żurawia. Lina stalowa łączy hak lub inny osprzęt dźwigowy z mechanizmem podnoszącym i utrzymuje cały ciężar ładunku.
Zblocze: Zblocze w systemie podnoszenia jednobelkowej suwnicy EOT (elektrycznej suwnicy pomostowej) jest kluczowym elementem używanym do podnoszenia i przenoszenia ładunków. Jest częścią mechanizmu podnoszącego i współpracuje z liną stalową i zespołem haka. Zblocze działa na zasadzie przewagi mechanicznej. Zwiększając liczbę krążków, zmniejsza się siła potrzebna do podniesienia danego ładunku.
Urządzenie podnoszące: Urządzenie podnoszące suwnicy jednobelkowej EOT (elektrycznej pomostowej) jest kluczowym elementem zaprojektowanym w celu bezpiecznego i wydajnego przenoszenia ładunku. Silnik podnoszący napędza bęben lub koło łańcuchowe, które zwija lub rozwija linę/łańcuch. Ruch przekazywany jest na hak, podnosząc lub opuszczając ładunek. Jednocześnie wózek umożliwia poziomy ruch ładunku wzdłuż belki, dzięki czemu żuraw jest wszechstronny w różnorodnych zastosowaniach.
 |
 |
3.Koniecprzewóz
Wózek końcowy suwnicy jednobelkowej EOT (elektrycznej podwieszanej) jest krytycznym elementem konstrukcyjnym i mechanicznym, który umożliwia dźwigowi poruszanie się po szynach suwnicy. Wózek końcowy podtrzymuje dźwigar suwnicy i umożliwia poziome poruszanie się całego układu suwnicy po szynach toru jezdnego. Zapewnia dźwigowi mobilność, umożliwiając dostęp do całej przestrzeni roboczej.
Ramy belek końcowych są wykonane ze stali o wysokiej wytrzymałości lub płyty konstrukcyjnej i stanowią podstawę konstrukcyjną dla zespołu koła i silnika.
Wózek końcowy z górnym prowadzeniem: Umiejscowiony na belkach pasa startowego, odpowiedni do zastosowań wymagających dużych obciążeń. Wózek końcowy z prowadzeniem podwoziem: zawieszany pod belkami pasa startowego, często stosowany w przypadku lżejszych ładunków lub przestrzeni o niskim prześwicie.
Zainstalowane na końcach, aby zapobiec kolizjom lub nadmiernemu przekroczeniu szyn. Hamulce są zintegrowane z układem napędowym, aby zapewnić precyzyjne zatrzymanie i bezpieczeństwo podczas pracy.
 |
 |
4.Mechanizm jazdy dźwigu
1) Zasada działania
Mechanizm jezdny napędzany jest silnikami elektrycznymi zamontowanymi na wózkach końcowych. Silniki te przenoszą moc na koła za pośrednictwem przekładni redukcyjnych, zapewniając kontrolowaną prędkość i moment obrotowy. Przekładnia zmniejsza prędkość silnika, zwiększając jednocześnie moment obrotowy, dzięki czemu żuraw nadaje się do dużych obciążeń. ruch przekazywany jest na koła za pomocą bezpośredniego sprzęgu lub układu napędu łańcuchowo-wałowego. Koła, zwykle kołnierzowe, prowadzone są przez szyny przymocowane do konstrukcji suwnicy, zapewniając precyzyjny i stabilny ruch po torze jezdnym suwnicy. Przemienniki częstotliwości (VFD) lub systemy sterowania oparte na stycznikach regulują prędkość i kierunek ruchu żurawia. Operator może kontrolować przyspieszanie, zwalnianie i hamowanie, aby bezpiecznie obsługiwać ładunek.
2) Funkcje mechanizmu napędowego dźwigu
Ruch poziomy (jazda): Podstawową funkcją mechanizmu jezdnego dźwigu jest zapewnienie ruchu dźwigu wzdłuż szyn pasa startowego, umożliwiając przenoszenie ładunku z jednej strony budynku lub placu na drugą. Osiąga się to poprzez układ napędzany silnikiem, zazwyczaj z przekładnią lub napędem łańcuchowym, w zależności od konstrukcji.
Podnoszenie i opuszczanie ładunków: Chociaż podnoszenie i opuszczanie ładunków odbywa się głównie za pomocą mechanizmu podnoszącego, mechanizm jezdny umożliwia dźwigowi ustawienie haka lub ładunku w wymaganym miejscu poprzez przemieszczanie się po belce. Zwiększa to wszechstronność i zapewnia precyzyjne rozmieszczenie ładunku.
Płynna praca: mechanizm jezdny pomaga zapewnić płynny i wydajny ruch żurawia, minimalizując wibracje i szarpnięcia. Umożliwia poruszanie się żurawia z różną prędkością, zapewniając kontrolowany i precyzyjny ruch, szczególnie w przypadku delikatnych lub krytycznych ładunków.
Rozkład obciążenia: Mechanizm jezdny dźwigu pomaga równomiernie rozłożyć ciężar dźwigu i ładunek na szynach. Zapobiega to nadmiernym naprężeniom jakiejkolwiek części dźwigu lub konstrukcji, zapewniając bezpieczną pracę.
Integracja układu napędowego: Mechanizm obejmuje układ napędowy, zazwyczaj silnik elektryczny, połączony ze skrzynią biegów. Silnik zapewnia niezbędną moc do poruszania żurawiem, natomiast skrzynia biegów pozwala na kontrolę prędkości i momentu obrotowego w zależności od podnoszonego ładunku.
Hamowanie i zatrzymywanie: Mechanizm jezdny żurawia zawiera układy hamulcowe, które umożliwiają bezpieczne zatrzymanie żurawia w żądanych miejscach. Jest to niezbędne do dokładnego umieszczenia ładunku lub zatrzymania dźwigu, aby zapobiec przekroczeniu granic pasa startowego.
Sterowanie kierunkowe: Mechanizm umożliwia ruch żurawia zarówno do przodu, jak i do tyłu. Sterowanie kierunkowe można uzyskać poprzez kierunek zasilania silnika lub poprzez zastosowanie układu napędowego o zmiennej prędkości w celu uzyskania bardziej precyzyjnego sterowania.
Ochrona i bezpieczeństwo: Elementy zabezpieczające, takie jak wyłączniki krańcowe, które zatrzymują żuraw na końcu pasa startowego, oraz urządzenia zapobiegające kołysaniu są często zintegrowane z mechanizmem jezdnym, aby zapobiec wypadkom lub uszkodzeniu żurawia i ładunku.
Podparcie konstrukcji mostu: W żurawiu EOT z pojedynczą belką mechanizm jezdny jest zamontowany na końcach belki mostu, podtrzymując całą konstrukcję podczas jej ruchu. Zapewnia to stabilność i równowagę żurawia podczas jego pracy.
Efektywność energetyczna: Nowoczesne mechanizmy jezdne dźwigów są zaprojektowane tak, aby działać przy minimalnym zużyciu energii. Zaawansowane systemy sterowania silnikiem (takie jak napędy o zmiennej częstotliwości) mogą zoptymalizować zużycie energii i zwiększyć wydajność żurawia, jednocześnie zmniejszając koszty operacyjne.
5.Mechanizm jezdny wózka
1) Skład strukturalny
1. Rama wózka: Rama wózka jest główną konstrukcją mechanizmu jezdnego i zapewnia wsparcie dla wszystkich pozostałych elementów. Jest zwykle wykonany ze stali, aby zapewnić wytrzymałość i trwałość. Rama składa się z głównego korpusu, w którym znajduje się mechanizm wciągnika i inne krytyczne części. Została zaprojektowana tak, aby pasowała do belki dźwigu, umożliwiając ruch wzdłuż belki.
2. Mechanizm napędowy (silnik i przekładnia): Silnik napędza ruch wózka. Silnik to zazwyczaj silnik elektryczny połączony z przekładnią redukcyjną, która dostosowuje prędkość i moment obrotowy do wymaganego poziomu w celu zapewnienia płynnej pracy. Silnik i przekładnia są zamontowane na ramie wózka w celu bezpośredniego napędzania kół wózka.
3. Koła wózka: Są to zazwyczaj koła stalowe zamontowane na osiach, które toczą się po szynach belki podwieszanej (znanej również jako kolej jednoszynowa lub tor). Koła są zaprojektowane tak, aby utrzymać ciężar wózka i przewożonego przez niego ładunku, jednocześnie umożliwiając płynne ruch wzdłuż belki.
4. Tor (szyna): Tor lub szyna jest kluczową częścią mechanizmu jezdnego wózka. Jest to metalowy system szynowy, zwykle montowany na belce podwieszanej, po której porusza się wózek. Tor zapewnia, że wózek porusza się po linii prostej i utrzymuje ciężar wózka i ładunku.
5. Mechanizm podnoszący (wciągnik i hak): Wciągnik jest integralną częścią wózka i odpowiada za podnoszenie i opuszczanie ładunku. Zwykle składa się z bębna, liny podnoszącej i haka. Układ wciągnika jest montowany na ramie wózka i może poruszać się wzdłuż belki, co pozwala na ustawienie ładunku na całej długości żurawia.
6. Wózki końcowe: Są to konstrukcje na końcach belki, które zapewniają podparcie całego mechanizmu dźwigu. Rama wózka jest połączona z wózkami końcowymi, które pomagają kierować ruchem wzdłuż belki dźwigu. Koła wózka końcowego poruszają się po szynach belki głównej, a ich podstawową funkcją jest utrzymywanie ciężaru i stabilność żurawia.
7. Układ sterowania: Ruch wózka jest kontrolowany przez elektryczny układ sterowania, który obejmuje joystick lub sterowanie wiszące, napęd o zmiennej częstotliwości (VFD) i wyłączniki krańcowe zapewniające płynny i bezpieczny ruch. Układ sterowania reguluje prędkość , kierunek i ograniczniki wózka oraz zapewnia funkcje bezpieczeństwa, takie jak zabezpieczenie przed przeciążeniem.
8. Hamulce: Układy hamulcowe są niezbędne do zatrzymania wózka w żądanej pozycji. Mogą one obejmować hamulce mechaniczne (takie jak hamulce tarczowe lub bębnowe) oraz hamulce elektryczne, które włączają się w razie potrzeby, aby zapewnić kontrolowane zatrzymanie i utrzymanie ładunku.
9. Sprężyny buforowe (opcjonalne): Do wózka można dodać sprężyny buforowe lub amortyzatory, aby absorbować nagłe uderzenia lub siły podczas ruchu. Zapewnia to płynną pracę, szczególnie gdy wózek znajduje się w pobliżu końcowych punktów jazdy.
10. Konstrukcja wsporcza: Cała konstrukcja dźwigu, łącznie z belką i wózkiem, opiera się na ramie nośnej, która może obejmować dźwigary lub belki. Mają one za zadanie utrzymać obciążenie i zapewnić stabilność wózka i dźwigu podczas pracy.
2) Funkcja mechanizmu napędowego wózka
Ruch wózka po belce
Podstawową funkcją wózka jest przesuwanie ładunku wzdłuż poziomej belki (lub dźwigara) dźwigu. Porusza się on w kierunku wzdłużnym (zwykle od lewej do prawej) po pomoście dźwigu, umożliwiając dokładne ustawienie ładunku nad określonym położenie na powierzchni roboczej.
Obsługa ładunku
Wózek obsługuje mechanizm podnoszący, taki jak hak lub urządzenie podnoszące, które może podnosić lub opuszczać ładunek. Gdy wózek porusza się wzdłuż belki, zapewnia przemieszczanie ładunku w poprzek rozpiętości dźwigu do różnych pozycji, umożliwiając efektywne przenoszenie materiału .
Mechanizm napędzany
Wózek jest zwykle napędzany przez układ silnikowy połączony z kołami poruszającymi się po szynach lub torach zamontowanych na belce.
Silniki te są często elektryczne i zasilane poprzez szynę prądową lub system kablowy.
Kontrola ruchu
Ruch wózka jest zwykle kontrolowany przez operatora, ręcznie lub za pomocą zautomatyzowanych elementów sterujących, co pozwala na precyzyjne ustawienie ładunku.
Wydajność i elastyczność
System wózków pozwala dźwigowi na dużą efektywność transportu materiałów, ponieważ może on umieszczać ładunki na całej belce, od jednego końca do drugiego, optymalizując wykorzystanie przestrzeni roboczej.
Bezpieczeństwo i stabilność
Konstrukcja systemu wózków skupia się także na zachowaniu stabilności podczas transportu ładunku. Obejmuje to mechanizmy zapobiegające kołysaniu się lub kołysaniu ładunku w ruchu.
6.Koło dźwigu
Koło dźwigu dźwigu jednobelkowego EOT (elektrycznego jezdnego) jest kluczowym elementem umożliwiającym poruszanie się dźwigu po torze napowietrznym. Zwykle stanowi część mechanizmu wózka dźwigu i współpracuje z innymi elementami, umożliwiając dźwigowi przemieszczanie się poziomo wzdłuż belek.
Koła dźwigów są zwykle wykonane ze stali o wysokiej wytrzymałości lub stali kutej, co zapewnia trwałość i nośność. Wybór materiału pomaga poradzić sobie ze znacznym ciężarem i siłami występującymi podczas pracy. Koła są zaprojektowane do poruszania się po szynach (zwykle torach z belkami dwuteowymi) zainstalowanych wzdłuż toru jezdnego suwnicy. Koła często mają zwężającą się lub kołnierzową krawędź, co pomaga im utrzymać się centralnie na gąsienicy i utrzymać stabilny ruch.
Koła te przenoszą ciężar całej konstrukcji żurawia, łącznie z ładunkiem podnoszonym za pomocą haka żurawia. Koła muszą przenosić zarówno obciążenia statyczne, jak i siły dynamiczne podczas ruchu dźwigu. Koła są zwykle wyposażone w łożyska toczne lub kulkowe, aby zmniejszyć tarcie i zapewnić płynny ruch. Łożyska te umożliwiają wydajne obracanie się kół dźwigu, dzięki czemu żuraw może poruszać się przy minimalnym wysiłku.

7. Hak dźwigowy
1) Hak dźwigu w jednobelkowym żurawiu EOT (Electric Overhead Travelling) jest kluczowym elementem służącym do podnoszenia i transportu ładunków. Hak jest przeznaczony do mocowania do podnoszonego ładunku, zwykle za pomocą łańcucha, liny lub zawiesia i jest obsługiwany za pośrednictwem mechanizmu podnoszącego dźwigu. Hak dźwigu może być stały lub obrotowy. Hak stały pozostaje nieruchomy, natomiast hak obrotowy może się obracać, umożliwiając swobodne obracanie się ładunku podczas transportu. Hak dźwigowy jest istotną częścią systemu podnoszącego, współpracując z bębnem podnoszącym, wózkiem i belką, aby zapewnić wydajne i bezpieczne podnoszenie ciężarów.
2) Hak ma zazwyczaj kształt litery „J” lub „C” ze spiczastą końcówką ułatwiającą przymocowanie do ładunku. Może być również wyposażony w zatrzask (zatrzask zabezpieczający) zabezpieczający przed przypadkowym rozłączeniem. Udźwig haka zależy od konstrukcji żurawia. Żurawie jednobelkowe EOT są często projektowane do lekkich i średnich obciążeń i mogą mieć udźwig od kilku ton do kilkuset ton. Hak może zawierać zatrzask zabezpieczający ładunek, zapobiegający jego zsunięciu się podczas podnoszenia. Niektóre zaawansowane haki są wyposażone w urządzenia zapobiegające przechyleniu lub ograniczniki przeciążenia dla zwiększenia bezpieczeństwa.

Silnik
Silnik dźwigu jednobelkowego EOT (Electric Overhead Travelling) jest krytycznym elementem działania żurawia, odpowiedzialnym za napędzanie ruchu dźwigu wzdłuż jego belki (dźwigara) oraz podnoszenie lub opuszczanie ładunku.
Rodzaje silników stosowanych w żurawiach EOT:
Silniki indukcyjne:
Powszechnie stosowane w żurawiach EOT ze względu na ich solidność i prostotę. Silniki te działają na zasadzie indukcji elektromagnetycznej i są typowo silnikami klatkowymi. Wykorzystuje się je zarówno do podnoszenia, jak i przemieszczania wózków.
Silniki prądu stałego:
Silniki prądu stałego są wykorzystywane do zastosowań wymagających precyzyjnej kontroli prędkości i wysokiego momentu rozruchowego. Jednak są one mniej powszechne w nowszych konstrukcjach ze względu na wymagania konserwacyjne oraz koszt szczotek i komutatorów.
Silniki prądu przemiennego:
Nowoczesne żurawie EOT coraz częściej wykorzystują silniki prądu przemiennego (zarówno indukcyjne, jak i synchroniczne), ponieważ są one energooszczędne, wymagają mniej konserwacji i mają lepszą regulację prędkości w porównaniu do silników prądu stałego.
3) Silnik wciągnika: Silnik ten napędza mechanizm podnoszący dźwigu, umożliwiając mu podnoszenie i opuszczanie ładunku. Często jest to silnik o wysokim momencie obrotowym, przeznaczony do pracy przerywanej.
4) Kluczowe cechy silnika żurawi EOT z pojedynczą belką:
Napędy o zmiennej częstotliwości (VFD): Przetwornice częstotliwości służą do kontrolowania prędkości silnika i zapewniają płynne przyspieszanie i zwalnianie, zwiększając ogólną wydajność żurawia.
Mechanizmy hamulcowe: Silniki są zwykle łączone z hamulcami elektrycznymi, aby utrzymać ładunek w pozycji, gdy silnik nie pracuje i zapobiec nagłemu upadkowi obciążenia.
Zabezpieczenie przed przeciążeniem: Silniki stosowane w żurawiach EOT są wyposażone w urządzenia zabezpieczające zapobiegające przegrzaniu, przeciążeniu lub jakimkolwiek awariom elektrycznym.

.
Dźwiękowy i świetlny system alarmowy oraz wyłącznik krańcowy
1) System alarmowy dźwiękowy i świetlny
Alarm dźwiękowy (brzęczyk lub syrena): Emituje głośny i wyraźny dźwięk, aby ostrzec pracowników o ruchu dźwigu. Zwykle ma regulowane poziomy dźwięku, aby dopasować je do poziomu hałasu otoczenia w środowisku pracy.
Alarm wizualny (migająca lampa ostrzegawcza lub dioda LED): Jasne, przyciągające uwagę światło (często stroboskopowe lub obrotowe), które miga podczas pracy dźwigu. Zapewnia wizualną wskazówkę dla tych, którzy mogą nie słyszeć alarmu dźwiękowego.
2) Wyłącznik krańcowy
Wyłącznik krańcowy w jednobelkowym żurawiu EOT (Electric Overhead Travelling) to krytyczne urządzenie zabezpieczające zaprojektowane w celu zapobiegania nadmiernemu wychynięciu haka, wózka lub mostu dźwigu. Zapewnia bezpieczeństwo operacyjne, automatycznie zatrzymując ruch poza ustalonymi granicami, unikając uszkodzenia żurawia, jego komponentów lub pobliskiego sprzętu.
Funkcje: Zabezpieczenie przed przeciążeniem: Zapobiega przesunięciu haka poza najwyższy bezpieczny punkt (limit ruchu w górę).
Rodzaje wyłączników krańcowych w żurawiach EOT:
Obrotowy wyłącznik krańcowy: używany do zastosowań dźwigowych. Przekształca ruch obrotowy wału silnika na sygnały elektryczne, aby zatrzymać silnik po osiągnięciu zadanego obrotu.
Grawitacyjny wyłącznik krańcowy: Często używany do zapobiegania przeciągnięciu. Działa w oparciu o mechaniczny ciężar, który uruchamia wyłącznik, gdy hak osiągnie maksymalną bezpieczną wysokość.
Wyłącznik krańcowy dźwigni/tłoczka: używany podczas jazdy wózkiem i pomostem. Włączany, gdy wózek lub pomost osiągnie położenie końcowe.
Zbliżeniowy wyłącznik krańcowy: Wykrywa pozycję bez kontaktu fizycznego za pomocą czujników magnetycznych, optycznych lub ultradźwiękowych. Powszechnie stosowane w nowoczesnych, zautomatyzowanych dźwigach.
Mikrowyłącznik krańcowy: kompaktowy i używany do precyzyjnej kontroli ruchu.

10. Urządzenia zabezpieczające
1. Wyłączniki krańcowe
Wyłącznik krańcowy podnośnika: zapobiega nadmiernemu podnoszeniu lub nadmiernemu opuszczaniu poprzez odcięcie zasilania, gdy hak osiągnie górną lub dolną granicę.
Wyłącznik krańcowy jazdy: Zatrzymuje dźwig lub wózek po osiągnięciu końca dopuszczalnej ścieżki jazdy, aby uniknąć kolizji lub wykolejenia.
2. Zabezpieczenie przed przeciążeniem
Wykrywa nadmierne obciążenie dźwigu i uniemożliwia pracę, jeśli ładunek przekracza udźwig znamionowy dźwigu.
Powszechnie stosowane są czujniki przeciążenia lub elektroniczne systemy monitorowania obciążenia.
3. Przycisk zatrzymania awaryjnego
Umożliwia operatorowi natychmiastowe zatrzymanie wszystkich operacji żurawia w sytuacji awaryjnej.
Zwykle znajduje się na panelu sterowania lub na panelu sterowania.
4. Urządzenia antykolizyjne
Czujniki lub systemy zapobiegające kolizji dwóch dźwigów na tym samym pasie startowym poprzez automatyczne zatrzymanie lub spowolnienie dźwigu.
5. Układy hamulcowe
Hamulec wciągnika: Załącza się automatycznie, aby utrzymać ładunek, gdy silnik podnoszący nie jest zasilany.
Hamulec jezdny: zapobiega niezamierzonemu ruchowi dźwigu lub wózka.
6. Ochrona przed przegrzaniem
Przekaźniki termiczne chronią silniki dźwigu przed przegrzaniem, wyłączając je, gdy temperatura przekroczy bezpieczne granice.
7. Zabezpieczenia lin stalowych lub łańcuchów
Prowadnice liny lub łańcuchy zapewniające prawidłowe nawinięcie na bęben.
Łańcuchy lub liny nośne są projektowane tak, aby spełniać określone współczynniki bezpieczeństwa i zapobiegać awariom pod obciążeniem.
8. Zderzak i amortyzatory
Zainstalowany na końcach toru jezdnego dźwigu, aby pochłonąć uderzenie, gdy żuraw osiągnie koniec swojego zakresu ruchu.
9. Zabezpieczenie podnapięciowe
Chroni żuraw przed pracą przy niewystarczającym napięciu, co może spowodować uszkodzenie elementów elektrycznych.
10. Alarmy audiowizualne
Syreny ostrzegawcze, światła lub dzwonki ostrzegają personel znajdujący się w pobliżu ruchu dźwigu.
11. Zatrzask zabezpieczający hak
Zapobiega przypadkowemu zsunięciu się ładunku z haka.
12. Urządzenia zapobiegające wykolejeniu
Zapewnia, że żuraw pozostaje bezpiecznie na torze podczas pracy.
13. Redukcja wahań obciążenia
Niektóre zaawansowane systemy obejmują czujniki minimalizujące wahania obciążenia, zwiększające bezpieczeństwo operacyjne.
14. Systemy kontroli i monitorowania
Kamery, wskaźniki obciążenia lub wyświetlacze cyfrowe zapewniają monitorowanie pracy żurawia w czasie rzeczywistym, pomagając w bezpieczniejszym użytkowaniu.
11.Tryb sterowania
Sterowanie wisiorkiem
Opis: Przewodowy wisiorek zwisający z dźwigu umożliwia operatorowi kontrolowanie jego ruchów.
Pilot radiowy
Opis: Bezprzewodowy kontroler ręczny lub montowany na pasku umożliwia zdalną obsługę.
Sterowanie kabiną
Opis: Operator siedzi w kabinie zamontowanej na żurawiu i steruje nim za pomocą joysticków lub dźwigni.
Sterowanie automatyczne lub półautomatyczne
Opis: Żuraw działa w oparciu o zaprogramowane instrukcje, albo w pełni autonomicznie, albo przy ograniczonej interwencji człowieka.
Połączone tryby sterowania
Niektóre żurawie EOT oferują wiele trybów sterowania (np. zawieszenie + pilot), co zapewnia wszechstronność. Operatorzy mogą przełączać się między trybami w zależności od potrzeb operacyjnych.
Naszkicować

Główny techniczny

Zalety
Opis produktów
1. Opłacalne
Niższy koszt początkowy: Ponieważ wykorzystuje pojedynczy dźwigar, koszty materiałów do budowy są zmniejszone, co czyni go tańszym niż żuraw dwubelkowy. Niższe koszty konserwacji: Dzięki mniejszej liczbie części i prostszej konstrukcji koszty konserwacji są generalnie niższe.
2. Efektywność przestrzenna
Kompaktowa konstrukcja: konstrukcja z pojedynczą belką zajmuje mniej miejsca w pionie, dzięki czemu idealnie nadaje się do obszarów o ograniczonej wysokości. Zoptymalizowana pod kątem małych i średnich ładunków: doskonale nadaje się do zastosowań od lekkich do średnich, gdzie nie jest wymagany duży udźwig.
3. Prostota obsługi i projektowania
Mniej skomplikowany: Konstrukcja z pojedynczą belką jest prostsza mechanicznie, co zmniejsza ryzyko awarii mechanicznej oraz ułatwia obsługę i konserwację. Łatwość instalacji: Żuraw można szybko zainstalować dzięki prostszej konstrukcji, co skraca czas instalacji i związane z tym koszty.
4. Efektywność energetyczna
Niższe zużycie energii: Ponieważ żurawie z pojedynczą belką zazwyczaj obsługują lżejsze ładunki, zużywają mniej energii w porównaniu do żurawi z podwójną belką, co czyni je bardziej energooszczędnymi w przypadku mniejszych zastosowań.
5. Elastyczność i wszechstronność
Regulowana wysokość podnoszenia: Zespół wciągnika można regulować w celu dostosowania do różnych wysokości ładunku, zapewniając elastyczność w obsłudze różnych typów materiałów. Nadaje się do różnych zastosowań: Można go stosować w magazynach, fabrykach, garażach i na liniach montażowych, gdzie podnoszenie ciężkich ładunków nie jest możliwe stałe wymaganie.
6. Łatwość konserwacji
Mniej komponentów: przy mniejszej liczbie części konserwacja jest zwykle łatwiejsza i wymaga mniej przestojów. Uproszczone rozwiązywanie problemów: prostsza konstrukcja oznacza mniej komponentów do rozwiązywania problemów, co pozwala na szybsze naprawy i zmniejsza prawdopodobieństwo poważnych awarii.
7. Płynna praca
Stabilne podnoszenie: Żuraw jednobelkowy zapewnia stabilne i płynne podnoszenie ładunków, ponieważ wciągnik porusza się wzdłuż pojedynczej belki bez nadmiernego kołysania i niestabilności.
8. Wysoka prędkość podnoszenia
Duże prędkości podnoszenia: Konstrukcja umożliwia szybsze podnoszenie lżejszych ładunków, co może poprawić ogólną produktywność w środowiskach o dużej rotacji materiałów.
9. Zmniejszone obciążenie budynku
Lekki: Sam żuraw jest lżejszy, co zmniejsza obciążenie konstrukcji budynku, dzięki czemu można go stosować w obiektach o niższym udźwigu.
Aplikacja:
1. Postępowanie z materiałami w fabrykach i magazynach
Załadunek i rozładunek: Żurawie EOT z pojedynczą belką są często używane do załadunku i rozładunku materiałów z ciężarówek, wagonów lub innych pojazdów transportowych.
Przenoszenie towarów w obszarach magazynowania: W magazynach pomagają w transporcie ciężkich towarów przez różne części obiektu, szczególnie w wąskich korytarzach lub ciasnych przestrzeniach, gdzie inne rodzaje sprzętu mogą być nieefektywne.
2. Linie montażowe
Proces montażu: W środowiskach produkcyjnych, takich jak fabryki samochodów lub elektroniki, dźwigi jednobelkowe służą do podnoszenia i przenoszenia części wzdłuż linii montażowych, poprawiając wydajność produkcji.
Precyzyjna obsługa: te żurawie są szczególnie przydatne, gdy wymagana jest precyzja ruchu części, na przykład w przypadku przedmiotów delikatnych lub o dużej wartości.
3. Przemysł stalowy i metalowy
Podnoszenie ciężkich blach lub komponentów: Żurawie EOT z pojedynczą belką są szeroko stosowane w przemyśle stalowym i metalowym do podnoszenia i transportu ciężkich blach, kęsów lub elementów konstrukcyjnych.
Odlewnie: Podczas odlewania metali żurawie te służą do przemieszczania stopionego metalu i produktów odlewanych po hali produkcyjnej.
4. Place budowy
Transport materiałów budowlanych: Żurawie jednobelkowe mogą być używane do podnoszenia i przenoszenia materiałów, takich jak worki z cementem, pręty stalowe i inne ciężkie materiały budowlane na placach budowy.
Montaż konstrukcji prefabrykowanych: Żurawie te mogą również pomagać w montażu i wznoszeniu elementów prefabrykowanych na placach budowy.
5. Elektrownie
Konserwacja i naprawy: Żurawie EOT są używane w elektrowniach do podnoszenia ciężkiego sprzętu, części turbin, generatorów i innych maszyn podczas konserwacji lub wymiany.
Transport komponentów: Zarówno w elektrowniach cieplnych, jak i wodnych, dźwigi te służą do przenoszenia dużych komponentów, takich jak transformatory i reaktory.
6. Stocznie
Budowa i konserwacja statków: W stoczniach stosuje się jednobelkowe żurawie EOT do przenoszenia ciężkich elementów statków i pomocy przy montażu statków.
Podnoszenie części statku: Pomagają również w podnoszeniu dużych części, takich jak kadłuby statków lub elementy maszyn, które mają być zainstalowane na statkach.
7. Górnictwo
Transport materiałów: Żurawie EOT z pojedynczą belką służą do transportu materiałów takich jak rudy, minerały i węgiel w zakładach górniczych.
Ruch sprzętu: służą również do podnoszenia ciężkiego sprzętu górniczego lub części w celach konserwacyjnych.
8. Lotniska i węzły logistyczne
Obsługa ładunków: Żurawie EOT są wykorzystywane w terminalach cargo do podnoszenia i transportu ciężkich lub nieporęcznych przedmiotów, takich jak części samolotów lub duże kontenery towarowe.
Dźwigprodukcja procedura
1. Projektowanie i inżynieria
Planowanie wstępne: Faza projektowania rozpoczyna się od zebrania wymagań dla dźwigu, w tym udźwigu, rozpiętości, wysokości podnoszenia i warunków operacyjnych. Rysunki techniczne: Na podstawie wymagań tworzone są szczegółowe rysunki techniczne i obliczenia, w tym elementy konstrukcyjne, systemy elektryczne, i funkcje bezpieczeństwa.
2. Wybór materiału
Rama i elementy konstrukcyjne: Do ramy dźwigu, belek poprzecznych i innych części konstrukcyjnych zastosowano wysokiej jakości stal (np. IS 2062 lub równoważną). Komponenty elektryczne: Silnik dźwigu, skrzynia biegów, mechanizm wciągnika i panel elektryczny są pozyskiwane zgodnie z normą specyfikacje.
3. Produkcja komponentów
Wykonanie dźwigara: Belka główna (dźwigar) jest wytwarzana poprzez zespawanie ze sobą płyt stalowych. Dźwigar jest główną konstrukcją nośną. Wózki końcowe: są produkowane oddzielnie. Obejmują one koła, osie i konstrukcje wsporcze, które umożliwiają dźwigowi poruszanie się po torze. Montaż mostu: Most dźwigu jest montowany poprzez połączenie dźwigara z wózkami końcowymi. Montaż ten obejmuje montaż wsporników dla wciągnika i wózka.
4. Obróbka i wiercenie
Precyzyjne cięcie i wiercenie: Płyty stalowe i komponenty są przycinane na wymiar oraz wiercone są otwory w celu montażu i montażu innych części, takich jak szyny, koła i silniki. Spawanie: Wszystkie części są ze sobą spawane zgodnie ze specyfikacjami projektowymi. Szczególną uwagę zwraca się na to, aby spoiny były mocne i spełniały standardy jakości.
5. Zespół wciągnika i wózka
Mechanizm wciągnika: Mechanizm wciągnika jest zmontowany, łącznie z bębnem, liną stalową, silnikiem wciągnika i przekładnią. Wykonanie wózka: Wózek, który podtrzymuje mechanizm wciągnika i porusza się wzdłuż mostu, jest wytwarzany i instalowany z niezbędnymi układami kół i silników .
6. Okablowanie elektryczne i panel sterowania
Instalacja elektryczna: Rozplanowano okablowanie elektryczne, w tym połączenia z silnikami, systemami sterowania i czujnikami bezpieczeństwa.
Montaż panelu sterowania: Elektryczny panel sterowania, który będzie zarządzał działaniem żurawia, jest montowany, testowany i instalowany. Panel ten zawiera przełączniki, zabezpieczenie przed przeciążeniem i elementy sterujące zmienną prędkością.
7. Montaż żurawia
Montaż mostu: Gotowy dźwigar i wózki końcowe są połączone, tworząc most. Następnie jest montowany na szynach, aby poruszać się po belkach pasa startowego. Instalacja wciągnika i wózka: Wciągnik i wózek umieszcza się na moście, upewniając się, że są prawidłowo wyrównane z torem.
8. Testowanie
Testy przedoperacyjne: Przed testami na pełną skalę przeprowadzane są kontrole w celu sprawdzenia, czy elementy żurawia są prawidłowo zainstalowane, np. ustawienie wózka, kół i wciągnika. Testowanie obciążenia: Przeprowadza się test obciążenia, aby upewnić się, że żuraw może bezpiecznie podnieść wymagany ładunek. Żuraw jest testowany pod obciążeniem w celu sprawdzenia jego stabilności, funkcjonalności i mechanizmów bezpieczeństwa. Testy operacyjne: Żuraw jest testowany pod kątem płynnego działania w całym zakresie, w tym prędkości, hamowania i wszystkich systemów sterowania. Wszelkie problemy i usterki zostaną naprawione.
9. Kontrole bezpieczeństwa i jakości
Kontrola: Przeprowadzane są dokładne kontrole wszystkich elementów mechanicznych, elektrycznych i bezpieczeństwa żurawia, aby zapewnić zgodność z normami bezpieczeństwa i wymaganiami operacyjnymi. Końcowa kontrola jakości: Żuraw przechodzi końcową kontrolę jakości, aby upewnić się, że wszystkie systemy działają i spełniają wymagane specyfikacje .
10. Uruchomienie i dostawa
Pakowanie i transport: Gdy żuraw przejdzie wszystkie testy, jest on starannie pakowany i przygotowywany do transportu na miejsce instalacji. Instalacja na miejscu: Po dostawie żuraw jest instalowany w zakładzie klienta i przeprowadzany jest ostateczny rozruch, w tym na miejscu testowanie i dostosowywanie witryny.
11. Szkolenie i przekazanie
Szkolenie operatora: Operatorzy są szkoleni w zakresie bezpiecznej obsługi żurawia, w tym protokołów bezpieczeństwa, systemów sterowania i konserwacji. Dokumentacja: Przekazany jest kompletny zestaw dokumentów, w tym instrukcje obsługi, harmonogramy konserwacji i instrukcje bezpieczeństwa.

Widok warsztatu:
Firma zainstalowała inteligentną platformę do zarządzania sprzętem oraz zainstalowała 310 zestawów (zestawów) robotów manipulacyjnych i spawalniczych. Po zrealizowaniu planu będzie ich ponad 500 (zestawów), a wskaźnik sieciowania sprzętu osiągnie 95%. Oddano do użytku 32 linie spawalnicze, planowana jest instalacja 50, a stopień automatyzacji całej linii produktów osiągnął 85%.





Popularne Tagi: dźwig jednobelkowy eot, Chiny producenci, dostawcy, fabryka dźwigów jednobelkowych eot
Para
Suwnica EotNastępny
Dźwig Eot z podwójną belkąMoże ci się spodobać również





Wyślij zapytanie